● 具身本体:安全可靠、高上限、低成本
● 运动智能:高动态运动精细操作
● 交互智能:多模态感知人机交互
● 作业智能:任务决策任务执行
数据集AgiBot World(已开源)
大规模机器人学习数据集,包括基础模型、基准测试和一个生态系统,旨在为学术界和工业界提供高质量的机器人数据。数据集包含100多台机器人的100万条以上轨迹,覆盖100多个真实世界场景,涉及精细操控、工具使用和多机器人协作等任务。首个基于全领域真实场景、全功能硬件平台及全流程质量监管的百万真机数据集。覆盖家居、餐饮、工业、商超以及办公这五大与现实应用紧密关联的核心环境,涵盖数百个真实子场景及3000余种真实物。
基座大模型(G0-1)Genie Operator-1(已开源)
全球首个采用Vison-Language-Latent Action(ViLA架构、向全球开发者免费开放的通用具身智能模型,将降低具身智能的技术门槛,加速产业发展进程。GO-1由多模态大模型(VLM)和混合专家系统(MoE)组成,GO-1具备自然语言指令理解与推理能力,可结合人类视频学习新技能,在零样本或极少数据下适应新场景。该模型支持部署至不同机器人本体,实现”一脑多形”,并通过AgiBot Word数据集持续进化。
采推一站式开发平台Genie Studio
专为具身智能场景打造的一站式开发平台,具备数据采集、模型训练、仿真评测、模型推理的全链路产品能力,让“采”、“训”、“测”、“推”每个环节都能找到标准化解决方案。该平台提供从数据采集与管理、模型训练微调、仿真评测等全流程的支持,内置完整开发工具链,实现真机一键编译和部署。GO-1虽然仅基于AgBot G1机器人数据预训练,但已在松灵机器人、方舟机器人、Franka机械臂等不同本体上完成充分验证测试,展现出良好的可移植性。
世界模型开源平台 GenieEnvisioner
该平台融合预测、控制、评测三大核心能力,通过多视角视频扩散模型GE-Base和160M参数动作解码器GE-Act,实现机器人从视觉感知到动作执行的端到端解决方案。在真实测试中,搭载GE-Act的机器人可完成”做三明治”倒茶”擦桌面”等多项任务,标志着机器人从被动执行向主动"想象一验证一行动”的智能转变,此举将加速具身智能在工业、商业等场景的落地应用。
智元仿真平台 Genie Sim
Genie Sim能够精准还原机器人的操作环境,为多样化任务提供标准化的自动评测体系,衡量模型在各种场景下的表现,加速算法迭代流程,同时减少模型评测对昂贵物理硬件的依赖,显著降低测试成本。Genie Sim Benchmark是其面向模型评测的开源组件,包含十余个高难度评测任务、标准化测试场景及500+高保真三维资产。根据报道,其GO-1模型在Genie Sim 中的测试结果与真机测试结果的误差可以控制在5%以内
机器人中间件AimRT(已开源)
AimRT是智元机器人开源的一个面向现代机器人领域的运行时开发框架。它基于Modern C+t开发,相比ros具有轻量易部署。结合智元机器人自研的具身智能大模型(如GO-1),AimRT可作为A算法与硬件本体的桥梁。例如,通过AimRT传输视觉数据至云端大模型,再返回决策指令至机器人端实现复杂任务的实时处理。
机器人操作系统 灵渠OS(计划开源)
灵渠OS构建了”南向适配具身硬件、北向支撑智能应用的生态架构。该开源计划底层基于智元已开源的高性能中间件AimRT,提供分布式群体实时通信、硬件抽象等基础服务框架;上层则开放智能体服务框架,支持交互、作业、运动等智能基座模型的标准化对接,降低应用门槛;同时,还提供丰富工具链,涵盖开发调试、仿真验证、部署管理、数据录制等能力。
机器人创作平台灵创平台Link Craft
A加成的机器人多模态内容生成与编辑工具。一个连接合作伙伴与创造者的机器人动作与表达创作平台,机器人像人一样自然表达,让创作者像导演一样自由编排。拥有丰富的动作种类、支持预览编辑、动作导入、编排演绎等核心功能,平台内置大量标准动作模板,可极大简化动作编排与调试流程,将机器人的动作设计与二次开发难度降低到0门槛。
全栈开源(硬件+算法+数据集)
提供从理论验证到实践创新的全链条支持,降低研发门槛
具身机器人领域全栈布局,提供从底层技术到
应用创新的完整支持,推动产学研协同与人才培养
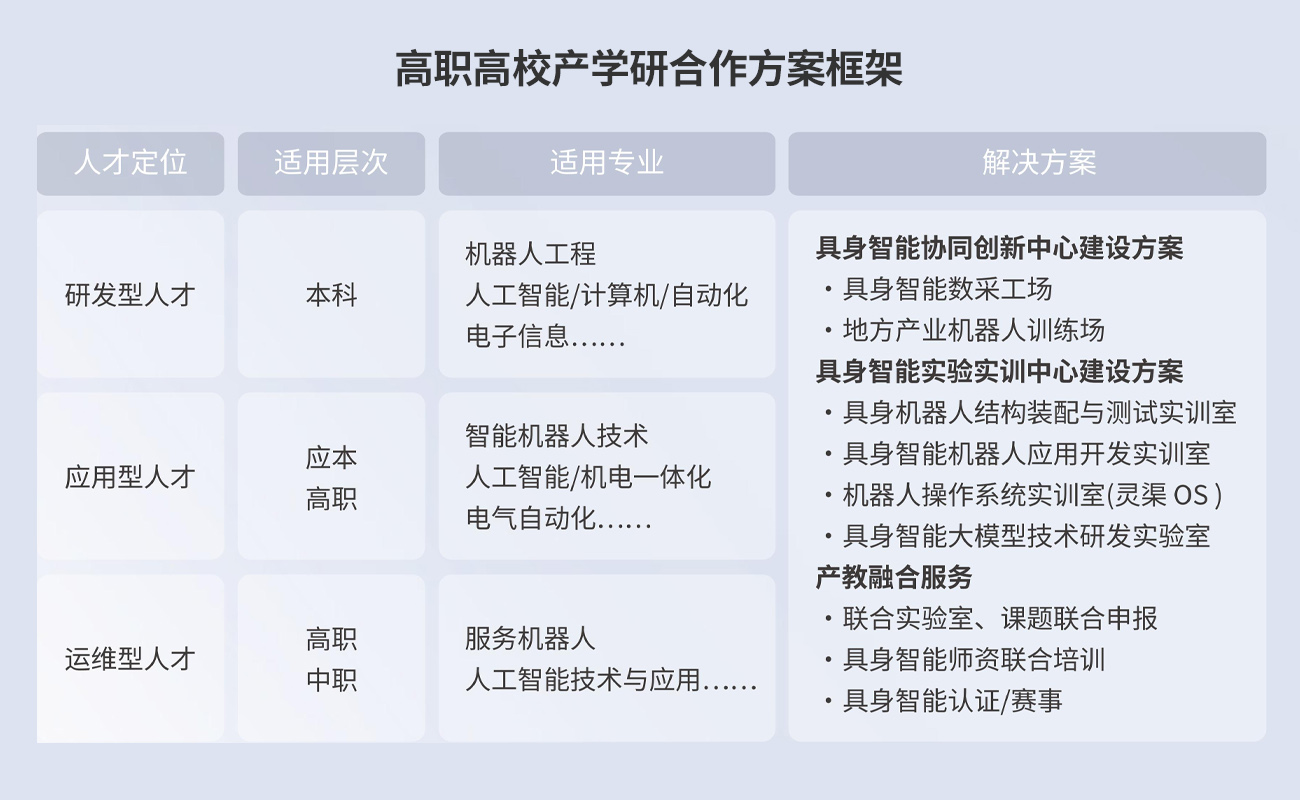
提供产品矩阵,支持各类科研教育需求
AgiBotWorld百万级真机数据+仿真数据
上游零部件、中游整机、下游场景落地、
横向具身企业和高校,全链路深度协同